

Одним из важнейших элементов соблюдения технологии нанесения грунтовки, краски, и лака, на кузова автомобилей, является поддержание особого микроклимата на производственных линиях и в процессе хранения. Индивидуальный микроклимат необходим в процессах сушки, обезжиривания, очистки и грунтования кузова автомобиля [4, 5]. Под микроклиматом будем понимать особые условия для использования воздушных потоков в технологическом процессе, т.е. воздушные потоки должны иметь определенные технологические параметры влажности и температуры. Нарушение параметров микроклимата приводит к неправильной работе производственных линий, нарушению технологии и подвергает опасности окружающую среду. Поддержание микроклимата рабочих установок обеспечивает вентиляционная система, которая состоит из следующих секций: сбора воздуха, фильтрации (первичная, вторичная), увлажнения, нагрева, впуска воздушного потока.
Рассмотрим этапы подготовки воздушного потока:
Первый этап. Процесс вентилирования начинается с этапа сбора воздуха, в котором происходит открытие механических демпферов с помощью электропривода, и запуск промышленных вентиляторов.
Второй этап. Процесс фильтрации воздушного потока разделяется на два вида фильтрации по степени очистки от размера загрязняющих веществ: первичная (для крупных и средних частиц) и вторичную (для мельчайших видов загрязняющих веществ)[1].
Третий этап. Процесс нагрева воздушного потока.
Четвертый этап. Процесс увлажнения воздушного потока с помощью распылительных форсунок.
Пятый этап. Процесс выпуска воздушного потока для участия в производственных процессах через механические демпфера с электроприводом.
Эти этапы приведены в виде схемы на рисунке 1.

Рисунок 1 – Схема системы вентиляции
1– механический демпфер (сверху вниз) №1-4;
2– промышленные вентиляторы;
3– фильтры;
4– распылительные форсунки;
5– циркуляционный насос;
6– газовый обогревательный прибор, с открытым пламенем;
7– ванна с водой для увлажнения воздушного потока;
8– выпускная камера;
9–секция сбора воздушного потока;
10–секция фильтрации;
11–секция нагрева;
12–секция увлажнения;
13–секция выпуска воздушного потока
Контроль и управление системы вентиляции осуществляется с помощью промышленного контроллера. В контроллер заранее прописываются и загружаются все основные физико-химические критерии воздушного потока. Параметры состояния воздушного потока осуществляются с помощью системы датчиков: давления, температуры, влажности (см. рисунок 2).
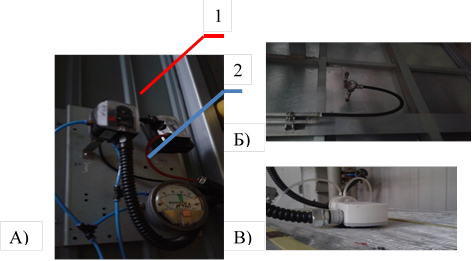

Рисунок 2 – А) изображение двух датчиков контроля за давлением: позиция 1 электронный датчик, позиция 2 механический датчик. Б) датчик температуры. В) датчик влажности.
Основная проблема работы вентиляции заключается в оледенении фильтров при отрицательных температурах приточного воздуха. Для предотвращения оледенения применили калориферный нагреватель.
Осуществим поиск наилучшей структуры управляющего устройства.
Объектом регулирования является система из двух проточных частей вентиляционной системы с калориферным нагревателем, изображенная на рисунке 3.

Рисунок 3–Система управления температурой
1– механический демпфер;
2–нагревательный калорифер;
3– воздушный фильтр;
4–секция фильтрации;
5– секция сбора воздуха.
Примем следующие обозначения: То – температура воздушного потока, поступающего в первую часть, Т2 – температура потока, выходящего из второй части, Т2d – заданный уровень температуры, выходящего из второй части. Нагреватель находится в секции сбора приточного воздуха вентиляционной системы и создаёт регулируемый поток тепла Q [2].
Приведем структурную схему объекта регулирования (см. рис. 4).

Рисунок 4– Структурная схема объекта регулирования
Выразили Т2(s) через Т0(s) и Т2d(s).
Для удобства записи обозначили

Операторное уравнение, соответствующее структурной схеме:
 ,
,
откуда получили выражение для T2(s) через T0(s) и T2d(s):
 , или
, или

Определили переходную характеристику Т2(t), считая Gc(s)=K=500, если T2d(s) мгновенно изменяется с A/s до 2A/s (образы скачков  и
и  ). Учитывали, что до скачка заданного значения температуры система находилась в стационарном состоянии.
). Учитывали, что до скачка заданного значения температуры система находилась в стационарном состоянии.
Провели математическое моделирование считая Gc(s) = K/s (см. рис. 7), и Gc = K1+K2/s (см. рис. 9) , для второго случая обеспечим время установления температуры T2 меньше 150 с. Значение К выбрали исходя из критерия качества (по [5] перерегулирование не должно превышать 10%).
Система управления описывается линейными дифференциальными уравнениями.

Рисунок 5– Структура математической модели системы при изменении управляющего воздействия с 30°С до 60°С (Регулятор температуры – пропорциональный)

Рисунок 6 – Результаты моделирования процесса при скачкообразном изменении задания температуры с 30°С до 60°С в системе с пропорциональным регулятором.
Верхняя осциллограмма, изображенная на рисунке 6 отражает изменение сигнала температуры T2d(t) и фактической температуры T2(t). Процесс начинается в момент времени t=0 c, когда сигнал принимает значение 30°С. Время первого достижения установившегося значения – 22 с. Полное затухание процесса в системе происходит примерно за 100 с. В момент времени t=100 c происходит скачкообразное нарастания до значения 60°С. Новый процесс затухает ещё через 100 с. Переходный процесс имеет быстрозатухающий колебательный характер.
На нижней осциллограмме рисунка 6 показан процесс изменения ошибки регулирования Еss=T2d(t) – T2(t). Видно, что абсолютная величина ошибки (установившееся значение) при отработке задании 30°С равно 5°С, а при отработке задания 60оС статическая ошибка равна 10°С.
На рисунке 7 приведена структурная схема исследуемой системы с новым значением Gc(s) (Gc(s)=K/s).

Рисунок 7 – Структура модели системы с интегральным регулятором температуры
На рисунке 8 показан процесс изменения температуры при отработке сигналов, который принимает значение 30°С в начальный момент времени и 60°С в момент времени t = 750 с. Видно, что при наличии интегрального регулятора ошибка регулирования (после завершения переходного процесса) равна нулю (Еss=0). Следует отметить, что процесс стал протекать медленнее, поскольку время первого достижения установившегося значения составляет около 220 с, а время затухания переходного процесса составляет около 500 с. Коэффициент усиления интегрального регулятора К=1. При этом значении перерегулирование процесса не превышает 10%.

Рисунок 8 – Процессы отработки задания температуры в системе с интегральным регулятором с коэффициентом усиления К=1
На рисунке 9 показана структура модели системы с пропорционально-интегральным регулятором температуры.

Рисунок 9 – Структурная схема модели системы регулирования с пропорционально-интегральным регулятором температуры
Коэффициенты К1=8 и К2=450 подобраны так, чтобы время установления температуры T2 было меньше 150 с и относительное перерегулирование менее 10%, что показано на осциллограммах процессов на рисунке 10.
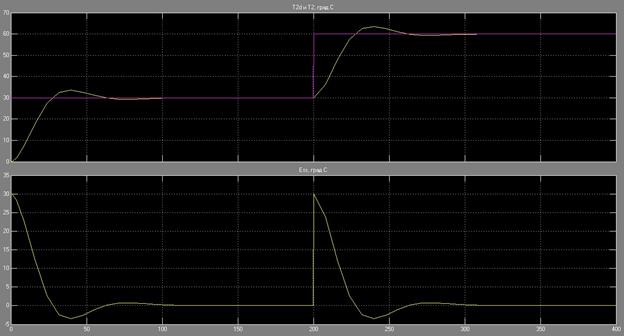 Рисунок 10 – Процессы в системе с пропорционально-интегральным регулятором температуры
Рисунок 10 – Процессы в системе с пропорционально-интегральным регулятором температуры
Видно, что качественные показатели процесса регулирования лучше, чем в предыдущих системах.
Полученные результаты свели в таблицу 1
Таблица 1– результаты математического моделирования
|
Вид регулятора |
Время переходного процесса, с |
Перерегулиро-вание,% |
Установившаяся ошибка регулирования,% |
|
Пропорциональный |
100 |
|
|
|
Интегральный |
600 |
|
0% |
|
ПИ-регулятор |
120 |
|
0% |



Для определения оптимального типа регулятора необходимо задать на основе экспертных оценок критерии значимости, приведённые в таблице 2[3].
Таблица 2– экспертные оценки значимости
|
Критерий значимости |
Время переходного процесса |
Перерегулирование |
Установившаяся ошибка регулирования |
|
Обозначение |
А1 |
А2 |
А3 |
|
Величина |
0.25 |
0.25 |
0.5 |


Оптимальным вариантом, согласно полученным результатам, является пропорционально-интегральный регулятор
Обсуждение результатов:
Изложили этапы технологии работы вентиляционной системы. Разработали передаточные функции для решения проблемы применения нагревателей, заключающейся в определении оптимального управления вентиляционной системы. Получили требуемое качество переходного процесса, рассмотрели различные структуры (П-,И-,ПИ-) регуляторов. Применили метод экспертных оценок и теорию оптимизации для синтеза корректирующего звена..
Результаты исследования показывают, что наилучшим вариантом выбора регулятора для данной системы является применение пропорционально-интегрального регулятора.
Библиографическая ссылка
Бывальцев С.В., Зимина М.В., Шевцов А.А. РАЗРАБОТКА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ВЕНТИЛЯЦИОННОЙ СИСТЕМЫ // Международный студенческий научный вестник. – 2018. – № 5. ;URL: https://eduherald.ru/ru/article/view?id=18686 (дата обращения: 20.04.2024).