

Важное значение для машиностроительной практики имеет исследование механизмов, в состав которых входят высшие кинематические пары р4, так как на их основе могут быть созданы машины и механизмы для перемещения плоских тел, например, ленты для подачи сыпучих материалов или штучных заготовок, листа из кожи, бумаги или других материалов. Одним из таких механизмов является пятизвенный механизм с перекатывающимся рычагом [1] (рис.1, а). Он состоит из кривошипа 1, шатуна 2, коромысла 3, перекатывающегося рычага 4 и стойки 5. Механизм собран в пять вращательных пар – O1, A, B, C, O2 с одной высшей кинематической парой D. Особенности его кинематического исследования были изложены в статьях [2] и [3].
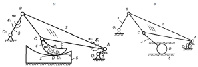
Рис. 1. Пятизвенный механизм c перекатывающимся рычагом с символом а) и с геометрическим замыканием – в)
Важной особенностью механизма является наличие в нем упругого элемента для обеспечения гарантированного контакта звеньев, входящих в высшую кинематическую пару. Постоянное соприкасание звеньев 4 и 5 может быть обеспечено также с помощью геометрического замыкания, если выполнить рычаг 4 в виде стержня с цилиндром, перемещающимся в направляющих (рис. 1, в).
Обратимся к общему алгоритму кинетостатического исследования механизма с перекатывающимся рычагом. Прежде всего, выделим выходное звено 4 (рис. 2, а), являющееся системой статически определимой.

Рис. 2. К силовому анализу а) выходного звена; в) диады 3-2
Составив уравнение  , определим реакцию Rt24. Из векторного уравнения суммы сил
, определим реакцию Rt24. Из векторного уравнения суммы сил  , действующих на звено 4, найдем реакции Rn24и R54, а, следовательно, и полную реакцию
, действующих на звено 4, найдем реакции Rn24и R54, а, следовательно, и полную реакцию  . Далее выделим двухповодковую группу Ассура (3-2, рис. 2, в), приложив к ней известную реакцию
. Далее выделим двухповодковую группу Ассура (3-2, рис. 2, в), приложив к ней известную реакцию  . Исходя из условия равенства нулю
. Исходя из условия равенства нулю  , находим Rt12. Из уравнения
, находим Rt12. Из уравнения  определяем реакцию Rt53. Из условия
определяем реакцию Rt53. Из условия  находим реакции Rn12 и Rn53, а, следовательно, и полные реакции
находим реакции Rn12 и Rn53, а, следовательно, и полные реакции  и
и  . Величина и направление реакции
. Величина и направление реакции  могут быть найдены из векторного уравнения
могут быть найдены из векторного уравнения  Таким образом, пятизвенный механизм с перекатывающимся рычагом имеет полную кинетостатическую разрешимость.
Таким образом, пятизвенный механизм с перекатывающимся рычагом имеет полную кинетостатическую разрешимость.
Библиографическая ссылка
Баклушин А.A., Максимова Е.Н. КИНЕТОСТАТИЧЕСКОЕ ИССЛЕДОВАНИЕ ПЛОСКОГО ПЯТИЗВЕННОГО МЕХАНИЗМА С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ // Международный студенческий научный вестник. – 2015. – № 5-5. ;URL: https://eduherald.ru/ru/article/view?id=14061 (дата обращения: 25.04.2024).