

В соответствии с числом общих наложенных на механизм условий связи (m), впервые введенным Артоболевским И.И., все механизмы делятся на пять семейств [1]. Параметр m может принимать исключительно целые положительные значения от 0 до 4. При введении m для каждого из семейств в универсальную структурную формулу подвижности Добровольского В.В. [2], записанную в виде
 (1)
(1)
получим аналитические зависимости, описывающие структуру механизмов всех пяти семейств. Приведем ниже эти зависимости для нулевого (m=0), первого (m=1), второго (m=2), третьего (m=3) и четвертого (m=4) семейств
|
|
(2) |
|
|
(3) |
|
|
(4) |
|
|
(5) |
|
|
(6) |
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
в которых n – числа подвижных звеньев механизмов, а p5, p4, p3, p2 и p1 – числа кинематических пар пятого, четвертого, третьего, второго и первого классов.
Обратимся к задаче синтеза кинематических схем простейших шарнирных механизмов всех семейств. Отметим, что в четвертом семействе невозможно создание шарнирных механизмов. Это связано с тем, что звенья таких механизмов имеют только два относительных движения в трехмерном декартовом пространстве (рис. 1).

Рис. 1. Трехмерные декартовы пространства, в которых работают механизмы четвертого семейства
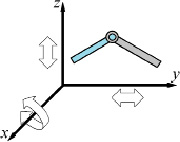
Рис. 2. Относительные движения звеньев, соединенных шарниром
Для звеньев, соединенных шарниром требуется три относительных движения в пространстве, среди которых два смещения вдоль двух осей в плоскости и один поворот в этой же плоскости (рис. 2).
Таким образом, шарнирные механизмы могут быть созданы во всех семействах кроме четвертого.
Для определения структур простейших шарнирных механизмов нулевого, первого, второго и третьего семейств обратимся к поиску параметров чисел звеньев и пар простейших групп нулевой подвижности (ГНП) указанных семейств. Для этого преобразуем формулы подвижности (2)-(5) с учетом использования в них только шарниров (одноподвижных пар р5), когда p4=0, p3=0, p2=0 и p1=0. Таким образом, запишем формулы (2) - (5) с учетом поставленных условий в виде
|
|
|
|
|
|
|
|
|
|
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
При введении W=0 в каждое из полученных уравнений определим зависимости между минимальным числом звеньев n и шарниров р5 ГНП. Так для нулевого семейства получим  , для первого
, для первого  , для второго
, для второго  и для третьего
и для третьего  Тогда из найденных зависимостей минимальными значениями для n и р5 будут соответственно в нулевом семействе - n=5 и p5=6, в первом семействе - n=4 и p5=5, во втором семействе - n = 3 и p5 = 4 и в третьем семействе - n = 2 и p5=3. Тогда, при соединении ГНП с ведущим звеном механизма, получим для систем с W = 1 в нулевом семействе - n = 6 и p5 = 7, в первом семействе - n=5 и p5=6, во втором семействе - n = 4 и p5 = 5, в третьем семействе - n = 3 и p5 = 4.
Тогда из найденных зависимостей минимальными значениями для n и р5 будут соответственно в нулевом семействе - n=5 и p5=6, в первом семействе - n=4 и p5=5, во втором семействе - n = 3 и p5 = 4 и в третьем семействе - n = 2 и p5=3. Тогда, при соединении ГНП с ведущим звеном механизма, получим для систем с W = 1 в нулевом семействе - n = 6 и p5 = 7, в первом семействе - n=5 и p5=6, во втором семействе - n = 4 и p5 = 5, в третьем семействе - n = 3 и p5 = 4.
По полученным параметрам приведем на рис. 3-6 шарнирные механизмы нулевого, первого, второго и третьего семейств.
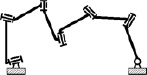
Рис. 3. Пространственный семизвенный механизм нулевого семейства
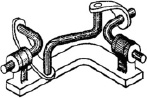
Рис. 4. Механизм двойного универсального шарнира первого семейства [3]
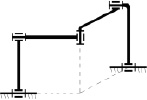
Рис. 5. Пространственный пятизвенник второго семейства [4]
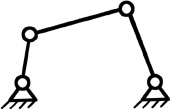
Рис. 6. Шарнирный четырехзвенник третьего семейства
Таким образом, шарнирные механизмы могут быть созданы во всех семействах кроме четвертого. Простейшими механизмами являются в нулевом семействе – семизвенный, в первом – шестизвенный, во втором – пятизвенный и в третьем – четырехзвенный. Более сложные механизмы могут быть синтезированы путем последовательного наслоения ГНП. При этом могут быть созданы и неодносемейственные шарнирные механизмы при соединении цепей разных семейств.
Работа выполнена при финансовой поддержке Министерства образования и науки РФ и Германской службы академических обменов DAAD в рамках программы «Михаил Ломоносов»
Библиографическая ссылка
Фомин А.С., Маракулина М.М. О ВОЗМОЖНОСТИ СИНТЕЗА ПРОСТЕЙШИХ ШАРНИРНЫХ МЕХАНИЗМОВ РАЗЛИЧНЫХ СЕМЕЙСТВ // Международный студенческий научный вестник. – 2015. – № 5-5. ;URL: https://eduherald.ru/ru/article/view?id=14073 (дата обращения: 16.04.2024).