

На сегодняшний день степень автоматизации и роботизации промышленных производств весьма высока. Применение промышленных манипуляторов, в современных производствах, достигает более 50% и любые улучшения в эффективности расходования энергии манипуляторами будут экономически и экологически выгодны. Кроме того, когда роботизированный манипулятор используется совместно с автономным мобильным роботом (для взаимодействия с окружающей средой, или для оказания помощи на открытых пространствах), энергоэффективность имеет решающее значение для продления срока службы батареи.
Ряд работ, посвящённых энергоэффективности роботов опирается на идею построения оптимальной траектории движения [5]. Встречаются работы, посвящённые исследованию влияния типа механизма, который используется для манипулятора, на его энергоэффективность [4]. Во всех работах, посвящённых изучению энергоэффективности манипуляторов и промышленных роботов, есть ряд допущений, сравнение ведется с использованием критериев, не пригодных для практического применения. Так, например, выбор типа двигателя, в первую очередь, может быть обусловлен вопросами не энергоэффективности, а вопросами области применения, точности, надежности и т.д.
Целью данной работы является сравнение энергоэффективности (с точки зрения потребления электрической энергии) параллельного и последовательного манипуляторов с одинаковыми двигателями и аналогичным рабочим пространством. Данная задача весьма актуальна ввиду того, что манипуляторы параллельной структуры, в последнее время, набирают популярность и активно внедряются в промышленность.
Прежде чем рассматривать вопросы энергопотребления манипуляторов, нужно изучить эффективность электродвигателей постоянного тока, которые используются в большинстве роботов. У двигателей постоянного тока, ток якоря пропорционален крутящему моменту двигателя:
 , (1)
, (1)
где Г - крутящий момент двигателя, а Km – постоянная крутящего момента. Напряжение на якоре двигателя:
 , (2)
, (2)
где  - скорость вращения якоря двигателя, Kb - постоянная ЭДС, La - индуктивность якоря, а Ra – сопротивление якоря. Моментальное использование мощности двигателя рассчитывается:
- скорость вращения якоря двигателя, Kb - постоянная ЭДС, La - индуктивность якоря, а Ra – сопротивление якоря. Моментальное использование мощности двигателя рассчитывается:
 (3)
(3)
Механическая мощность:
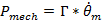 (4)
(4)
Эффективность двигателя можно определить, как отношение механической на электрическую мощности, т.е. - Pmech/Pelect. Графики эффективности бесколлекторного двигателя постоянного тока показаны на рисунке 1. Эффективность зависит от скорости вращения двигателя и равна нулю при нулевых оборотах, поскольку электрическая мощность поглощается сопротивлением якоря. В манипуляторах с различными кинематическими конструкциями требуются двигатели с разной скоростью вращения вала, это и является решающим фактором.
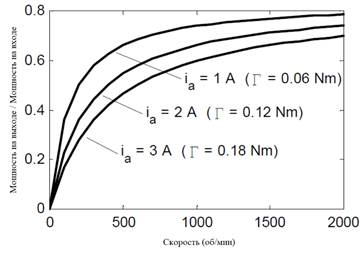
Рисунок 1 – Отношение производительности и скорости для двигателей постоянного тока
Выбор манипулятора
Обычный манипулятор с рабочим телом двигается поступательно, а не вращательно. Для многих задач достаточно три поступательные степени свободы. Поэтому в рассмотрении выберем манипулятор с тремя поступательными степенями свободы (X, Y, Z). Исходя из вышеприведенных критериев выбран параллельный манипулятор, разработанный университетом Мэриленда [1]. Его кинематическая структура показана на рисунке 2. Последовательный манипулятор выбран классической конструкции, с тремя степенями свободы, кинематическая структура которого, представлена на рисунке 3.
Потребляемая мощность для последовательного манипулятора
Динамика манипулятора была получена с использованием уравнений Лагранжа. Массы звеньев считались установленными в их средних точках, и полезная нагрузка была смоделирована в виде точечной массы, расположенной на рабочем теле.
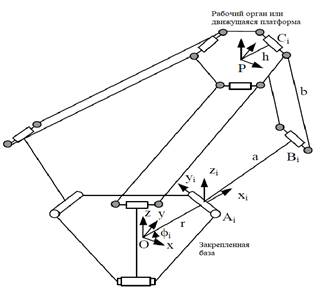
Рисунок 2 – Кинематическая схема параллельного манипулятора Мэриландского университета
Для каждого соединения, крутящий момент двигателя выражается следующим уравнением:
 , (5)
, (5)
где Rg - передаточное число, Jm = Ja + Jg - является суммой инерции двигателя и механизма, τ - крутящий момент. Ток якоря двигателя, напряжение и мгновенная мощность используются в уравнении 1, 2, 3. Среднее абсолютное использование мощности для манипулятора:
 (6)
(6)
где n - номер двигателя, a T - период потребления. Следует отметить, что потребляемая энергия должна быть рассчитана как произведение Ра на Т.
Рисунок 3 – Кинематическая схема сопряженного последовательного манипулятора
Потребляемая мощность для параллельного манипулятора
Из обратных кинематических уравнений, представленные в уравнении [2], получены скорость и ускорение. Соединительные звенья для каждой стороны определяются так, как показано на рисунке 4.
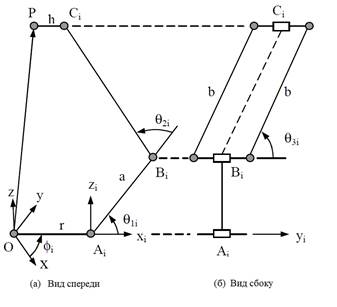
Рисунок 4 - Определение совместных сторон
Три уравнения связи для манипулятора:
 (7)
(7)
 (8)
(8)
 (9)
(9)
Сравнение мощности
Методы, описанные ранее, используются для расчета значений Pa для манипуляторов. Для сравнения определим коэффициент мощности как:
 (10)
(10)
Когда PR>1 параллельный манипулятор эффективнее, чем последовательный. Мощность, потребляемая каждым манипулятором будет меняться в зависимости от его положения, скорости и ускорения. Чтобы ограничить область действия, будем считатт, что рабочее тело манипулятора следует линейной траектории в направлении к одной из осей координат (X, Y или Z), начиная с точки покоя, с постоянным ускорением, а затем и с равномерным торможением. Значения - Pa и PR будут рассчитаны для ускорения и средних скоростей. Для определения влияния положения, вычислялось соотношение мощности для малых движений. Это все происходило в одинаково разнесенных точках на плоскости, через общую рабочую область манипуляторов, для получения коэффициента мощности.
Еще одна проблема заключается в эффекте статической нагрузки из-за действия силы тяжести. Для пространственного применения, или при статическом балансе (включая полезную нагрузку), гравитационная постоянная равна нулю.
На рисунках 5 и 6 показан более подробно коэффициент мощности при Z=0,75 м. На рисунке 7 показано соотношение мощности от площади. В целом последовательный манипулятор потреблял больше энергии в центре рабочей области и возле краев. Параллельный манипулятор имел относительно постоянное энергопотребление, которое увеличивалось, когда он приближался к краю рабочей области. В результате наблюдается наибольший коэффициент мощности в центре и по краям рабочей области (светлая область на рисунках). Такая же картина наблюдалась и при Х=0 в рабочей области. На рисунке 5 меньшие значения PR можно увидеть вблизи х=0, у=±0,3 м. В данных местах первый узел не нужен для последовательного манипулятора, чтобы обеспечить движение по оси X, поэтому его энергопотребление уменьшается.
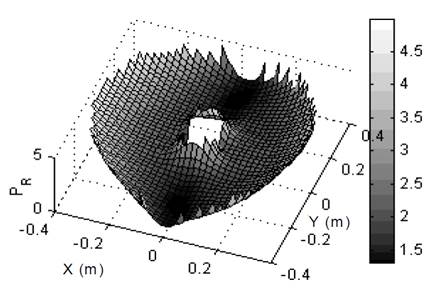
Рисунок 5 - Коэффициент мощности для движения в плоскости X, Z = 0,75 м с учетом силы тяжести. (Примечание: Для улучшения контрастности изображения PR значения больше 5 не отображаются)
Для изучения влияния скорости и ускорения на энергопотребление и соотношение мощности, использовались перемещение в 0,3 м по осям X, У и Z с ускорением равным от 0,6 до 4,8 м/с2. Учитывая, что механическая мощность равна произведению силы на скорость, то средняя мощность будет расти линейно с произведением ускорения на среднюю скорость. Эта гипотеза верна для обоих типов манипулятора, когда сила тяжести равна нулю. Однако, если учитывать силу притяжения эффект будет другим. Действие силы тяжести, влияет на ускорение и поэтому эффективность падает, а энергопотребление колеблется линейно со средней скоростью. При сравнении значений Pa можно заметить, что наличие силы притяжения (или поочередное отсутствие статической балансировки) повысило использование энергии почти вдвое. Из соответствующих PR-результатов было установлено, что соотношение мощности - это функция траектории движения, а не функция скорости или ускорения.
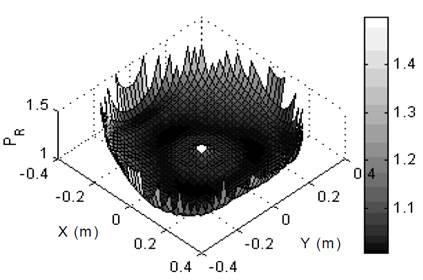
Рисунок 6 - Коэффициент мощности поверхности для движения в плоскости Z, Z = 0,75 м с учетом гравитации. (Примечание: Для улучшения контрастности изображения PR значения больше 1,5 не отображаются.)
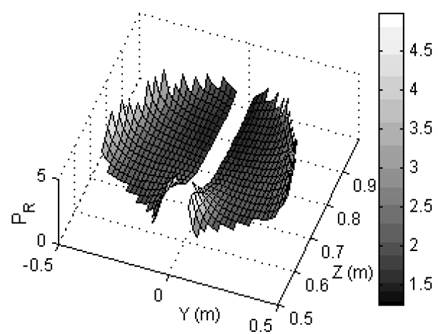
Рисунок 7 - Коэффициент мощности поверхности для движения в плоскости У, X = 0 с учетом гравитации. (Примечание: Для улучшения контрастности изображения PR значения больше 5 не отображаются)
Выводы
Среднее энергопотребление параллельного манипулятора составило всего 26% от энергопотребления последовательного манипулятора. Эта высокая эффективность не сильно отразилась на скорости, ускорении и статической нагрузке на рабочее тело, из-за действия силы тяжести. Преимущество параллельного манипулятора получено в основном из-за уменьшения движущейся массы. В параллельном манипуляторе есть свои недостатки. Он должен быть правильно спроектирован для того, чтобы обладать высокой эффективностью, о чем свидетельствует относительно низкая производительность некоторых конструкций параллельного манипулятора [3]. Желательно, чтобы его площадь была в два раза больше, чем в последовательном манипуляторе. Результаты также показали, что наличие силы тяжести (или отсутствие статической балансировки) привело к тому, что потребление энергии увеличилось почти в два раза. При действии силы тяжести, использование энергии всегда увеличивалось линейно со средней скоростью, а когда сила тяжести была равна нулю, она увеличивалась линейно, ускоряясь со средней скоростью.
Некоторые моменты в исследовании были исключены, а именно, потери при трении и неэффективность редукторов. Это приведет к увеличению энергопотребления обоих манипуляторов, поэтому значения Ра были занижены.
Библиографическая ссылка
Пахомова Л.А., Дубовсков В.В., Притоманов В.В. ОБЗОР И АНАЛИЗ ЭНЕРГОЭФФЕКТИВНОСТИ ПРОМЫШЛЕННЫХ РОБОТОВ // Международный студенческий научный вестник. – 2018. – № 1. ;URL: https://eduherald.ru/ru/article/view?id=18048 (дата обращения: 19.04.2024).